Что значит серая дорога в навигаторе
«2ГИС» представил обновлённый навигатор с мини-картой на экране, данными о камерах и парковках — Транспорт на vc.ru
Его уже подключил «Ситимобил».
18 071 просмотров
Обновлённый навигатор
Команда «2ГИС» переработала интерфейс навигатора: карте теперь отведено на 20% больше места на экране. На ней также сделали акцент на полезных для водителя данных — знаках полосности, камерах, парковках. Об этом картографический сервис рассказал на своей презентации.
На карте навигатора появился «градусник» с прогрессом маршрута и отображением пути в пробках, а также мини-карта в левом нижнем углу с обзором всего маршрута. Обзор можно включить касанием, при нажатии на мини-карту можно оценить поездку и пробки, скорректировать маршрут.
Обновлённый интерфейс навигатора «2ГИС»
Кроме интерфейса «2ГИС» обновил данные о дорожной разметке и знаках полосности. Подсказки с будущими манёврами стали показывать прямо на маршруте.
Мини-карта в углу экрана — привычная история для игрового мира. Игрок смотрит на неё, не отвлекаясь от игры, и понимает, что его ждёт дальше — где находятся важные точки, чему надо уделить больше внимания, а чего избежать.
Так и у нас: основной экран даёт всё, что надо для быстрого реагирования здесь и сейчас. А мини-карта, «градусник» и обзор маршрута дают ощущение большей уверенности на дороге, показывают, что будет через несколько минут поездки, через несколько километров.
Александр Сырков, продакт-менеджер «2ГИС»
Сервис также добавил информацию о камерах превышения скорости, в том числе для грузовиков и муляжи, значки нарушения парковки, заезда за стоп-линию и полосы общественного транспорта. Значок камеры показывает действующее ограничение и её расположение относительно потока.
Всего сервис показывает около 50 тысяч камер, из них более 9 тысяч — в Москве, Подмосковье, Санкт-Петербурге и Ленобласти.
Примеры значков камер ограничения скорости в навигаторе «2ГИС»
В «2ГИС» также появились детальные данные о парковках — это отдельный слой на карте и в режиме навигатора. Приложение покажет все парковки по пути следования и рядом с конечной точкой маршрута. Возле значков будет указано, платная она или бесплатная, общественная или с особым доступом, есть ли места для людей с ограниченными возможностями здоровья.
Приложение покажет все парковки по пути следования и рядом с конечной точкой маршрута. Возле значков будет указано, платная она или бесплатная, общественная или с особым доступом, есть ли места для людей с ограниченными возможностями здоровья.
Парковки на карте в навигаторе «2ГИС»
Сейчас данные о парковках собраны для 15 крупнейших городов России: Москвы, Санкт-Петербурга, Волгограда, Воронежа, Екатеринбурга, Казани, Нижнего Новгорода, Новосибирска, Омска, Перми, Ростова-на-Дону, Самары, Уфы, Красноярска и Челябинска. Этот список компания будет пополнять, но сроки не уточняет.
«2ГИС» обновил алгоритм для расчёта времени в пути. По результатам тестов оно определяется более чем на 20% точнее, чем раньше, говорят в компании.
В ближайшие месяцы навигатор будет работать в бета-режиме. Чтобы его протестировать, нужно обновить приложение, зайти в настройки навигатора и нажать «Включить новый навигатор».
Геотехнологии «2ГИС» для экосистемы «Сбера» и других компаний
В июле 2021 года «2ГИС» выпустил SDK для интеграции своих карт в мобильные приложения: их уже используют «СберБанк Онлайн» и сервис экспресс-доставки продуктов «Самокат». «Сбер» купил 72% в «2ГИС» летом 2020 года, ещё 3% получило СП банка с Mail.ru Group.
«Сбер» купил 72% в «2ГИС» летом 2020 года, ещё 3% получило СП банка с Mail.ru Group.
«Ситимобил» также теперь использует карты сервиса в своём приложении на Android, на iOS они появятся в ближайшее время. Это сказалось на скорости подачи такси и точности маршрута, рассказали в компании.
Движение такси на карте приложение пока не показывает, но пользователи уже могут заказать машину из «2ГИС», уточнили в компании: «Мы сделали SDK, чтобы наши геотехнологии могли использовать любые компании экосистемы, которым они необходимы. И не только они — SDK доступен любым компаниям».
Технологии «2ГИС» уже используются в связке с виртуальными ассистентами «Салют» от «Сбера». Например, на основе данных сервиса они могут рассказать пользователю о пробках или построить маршрут и открыть приложение «2ГИС». При записи на услугу или брони столика через ассистента, он будет искать информацию также в «2ГИС».
Экстраполяция позиции автомобиля / Хабр
В приложении 2ГИС теперь есть навигатор. Мы научились «ехать» по треку, озвучивать манёвры, автоматически перестраивать маршрут, рассчитывать время в пути, доводить пользователя до входа в здание или организацию, учитывая заборы и шлагбаумы, — и всё это в честном офлайне. Пробки (вот разве что для них нужен интернет), разведённые мосты и перекрытые улицы учитываем давно. Пока в нашем навигаторе — необходимый минимум. Чуть позже научим его предупреждать о слишком высокой скорости, лежачих полицейских и камерах ГИБДД, настроим ночной режим, сделаем маршруты по платным и грунтовым дорогам опциональными. Чтобы воспользоваться им, нужно обновить 2ГИС в своем смартфоне или скачать в AppStore или Windows Store. Для Android обновление выходит постепенно, начиная с 22 августа (будет доступно на всю аудиторию к сентябрю).
Мы научились «ехать» по треку, озвучивать манёвры, автоматически перестраивать маршрут, рассчитывать время в пути, доводить пользователя до входа в здание или организацию, учитывая заборы и шлагбаумы, — и всё это в честном офлайне. Пробки (вот разве что для них нужен интернет), разведённые мосты и перекрытые улицы учитываем давно. Пока в нашем навигаторе — необходимый минимум. Чуть позже научим его предупреждать о слишком высокой скорости, лежачих полицейских и камерах ГИБДД, настроим ночной режим, сделаем маршруты по платным и грунтовым дорогам опциональными. Чтобы воспользоваться им, нужно обновить 2ГИС в своем смартфоне или скачать в AppStore или Windows Store. Для Android обновление выходит постепенно, начиная с 22 августа (будет доступно на всю аудиторию к сентябрю).
А сегодня расскажем, как навигатор 2ГИС предугадывает положение автомобиля и плавно перемещает стрелочку по маршруту. Ведь именно качество ведения пользователя по маршруту определяет эргономику интерфейса любого современного навигатора, простоту ориентирования на местности и своевременность совершения манёвров.
Большую часть времени водитель автомобиля вынужден следить за дорогой, поэтому даже беглого взгляда на экран устройства с программой-навигатором должно быть достаточно, чтобы получить максимально точную и своевременную информацию о собственном местоположении относительно маршрута и окружающих объектов. Эта с виду простая функциональность требует решения множества технических проблем для своей реализации. Некоторые из них мы и рассмотрим.
Маркер GPS и маршрут
Чтобы обозначить местоположение пользователя на карте, многие навигаторы (и наш не стал исключением) используют специальный маркер GPS в виде наконечника стрелы или просто треугольника, который интуитивно понятным образом указывает направление движения. Кроме того, маркер должен быть хорошо заметен на карте, поэтому его цвет обычно сильно отличается от фона, края дополнительно обведены и т.д.
В самом простом случае можно отображать позицию устройства на местности, считывая координаты с датчика GPS и размещая маркер в соответствующее место на карте. Уже здесь мы сталкиваемся с первой проблемой — измерительной погрешностью, которая даже в условиях неплохого сигнала вполне может достигать 20–30 метров.
Уже здесь мы сталкиваемся с первой проблемой — измерительной погрешностью, которая даже в условиях неплохого сигнала вполне может достигать 20–30 метров.
Для ответа на обычный вопрос «Где я нахожусь?» такого способа отображения будет вполне достаточно, особенно если вокруг маркера нарисовать ещё и круг точности с радиусом, равным оценке погрешности. Однако для навигации нужно придумать что-то получше, ведь водителя, движущегося по городской улице, вряд ли устроит маркер GPS, расположенный внутри соседнего дома или, того хуже, на каком-нибудь внутриквартальном проезде.
Решить проблему помогает маршрут, построенный программой до точки назначения и всегда присутствующий в сценарии навигации. При помощи некоторых ухищрений мы можем «притянуть» точку на карте к маршруту, нивелируя некоторую часть измерительной погрешности датчика GPS. В первом приближении притяжку можно рассматривать как проецирование точки на линию маршрута. Рассмотрение же нюансов, а также способов обнаружения схода с маршрута, к сожалению, выходит за рамки данной статьи.
Взяв на вооружение обозначенный приём притяжки, мы можем абстрагироваться от двумерных географических координат (широты-долготы или любых других) и перейти к одномерной координате — смещению относительно начала маршрута, измеряемому, например, в метрах. Такой переход упрощает как теоретические модели, так и вычисления, выполняемые на устройствах пользователей.
Отображение геопозиции во времени
Дискретный характер поступления данных от датчика GPS — ещё одна проблема при реализации ведения пользователя по маршруту. В идеальном случае координаты обновляются один раз в секунду. Рассмотрим несколько вариантов отображения геопозиции во времени и выберем наиболее подходящий для наших задач.
1. Самый простой способ заключается в том, чтобы при получении каждого нового отсчёта от датчика тут же выполнять притяжку к маршруту и отображать соответствующее местоположение на карте. Среди достоинств стоит отметить исключительную лёгкость реализации, высокую в некотором смысле точность (ведь здесь мы просто отображаем спутниковые данные, не внося в них каких-либо серьёзных изменений) и минимальную вычислительную трудоёмкость. Главный недостаток в том, что маркер в этом случае не движется по карте в привычном понимании, а «телепортируется» из точки в точку. В основном сценарии навигации камера (виртуальный наблюдатель — термин из области компьютерной графики) привязана к маркеру GPS, поэтому подобные его телепортации приводят к резкому «проматыванию» карты вдоль маршрута и, как следствие, к дезориентации водителя, особенно на высоких скоростях, когда за время между отсчётами геопозиции автомобиль преодолевает значительное расстояние. Наша задача — помочь пользователю, а не сбить его с толку, поэтому указанного изъяна уже достаточно, чтобы исключить данный вариант из рассмотрения.
Главный недостаток в том, что маркер в этом случае не движется по карте в привычном понимании, а «телепортируется» из точки в точку. В основном сценарии навигации камера (виртуальный наблюдатель — термин из области компьютерной графики) привязана к маркеру GPS, поэтому подобные его телепортации приводят к резкому «проматыванию» карты вдоль маршрута и, как следствие, к дезориентации водителя, особенно на высоких скоростях, когда за время между отсчётами геопозиции автомобиль преодолевает значительное расстояние. Наша задача — помочь пользователю, а не сбить его с толку, поэтому указанного изъяна уже достаточно, чтобы исключить данный вариант из рассмотрения.
Единственная возможность избежать дезориентации состоит в том, чтобы перемещать маркер GPS плавно, без «телепортаций», а значит, двигать его нужно существенно чаще, чем приходят отсчёты геопозиции. Чтобы обеспечить такое движение, требуется каким-либо образом вычислять промежуточные точки между реальными отсчётами с датчика и использовать их, пока не будет получен очередной отсчёт. Конкретному подходу к вычислению этих промежуточных точек стоит уделить особое внимание, так как он в конечном итоге сильно повлияет на общую эргономику программы-навигатора.
Конкретному подходу к вычислению этих промежуточных точек стоит уделить особое внимание, так как он в конечном итоге сильно повлияет на общую эргономику программы-навигатора.
2. Второй способ отображать местоположение пользователя связан с самым очевидным подходом к генерации промежуточных точек — интерполяции между последними реальными отсчётами GPS. Смысл в том, чтобы двигать маркер от предпоследнего отсчёта к последнему в течение некоторого заданного времени, вычисляя промежуточные точки с требуемой частотой по одной из известных математических функций (простейший вариант — линейная интерполяция). Пользоваться навигатором при таком способе значительно удобнее, но недостатки у него тоже есть.
Один из самых безобидных — необходимость заранее задавать время интерполяции. Установка его в одну секунду будет хорошо работать только в упомянутом выше идеальном случае, когда именно столько времени будет проходить между отсчётами GPS. Если времени пройдёт меньше — не беда, можно просто начать двигаться из текущей позиции в новую целевую. А вот если больше — придётся маркеру стоять на месте и ждать новых координат от датчика, хотя автомобиль пользователя вполне может в это время двигаться.
А вот если больше — придётся маркеру стоять на месте и ждать новых координат от датчика, хотя автомобиль пользователя вполне может в это время двигаться.
Есть и более серьёзная проблема. В момент поступления нового отсчёта маркер в лучшем случае находится в предыдущей реальной точке. С точки зрения пользователя мы вносим ещё одну погрешность позиционирования, величина которой не меньше, чем расстояние, преодолеваемое автомобилем за время между отсчётами. При скорости в 100 км/ч это значение достигает почти 28 метров, что вкупе с возможной измерительной погрешностью делает информацию, выдаваемую пользователю, мягко говоря недостоверной.
Мы могли бы сделать маркер GPS огромных размеров и загородить им четверть экрана, тщательно маскируя недочёты описываемого способа позиционирования, но идти на прямой подлог было бы неуважением к пользователям и к самим себе. Точность и своевременность отображаемых данных — ничуть не менее важный критерий при разработке навигатора, чем внешняя красота и плавность движения.
3. С учётом появившегося требования к точности позиционирования стоит заметить, что теперь от нас требуется незадолго до прихода нового отсчёта GPS расположить маркер в точке, максимально приближенной к этому новому отсчёту. То есть, по сути, заглянуть будущее, пусть и ненадолго. Хотя с изобретением машины времени у человечества пока дела обстоят из рук вон плохо, для нас спасение всё же есть. Движение автомобиля инертно, поэтому скорость и направление его движения не могут меняться мгновенно, а раз так, мы можем попытаться с некоторой точностью спрогнозировать, где пользователь будет находиться в интервале между последним отсчётом позиции и будущим. Если нам удастся добиться того, что ошибка прогнозирования в большинстве случаев будет меньше, чем погрешность второго способа, то мы здорово облегчим жизнь пользователей нашего навигатора.
Такого рода прогнозирование в точных науках называется экстраполяцией. Именно этим путём мы пойдём в попытке разработать третий способ ведения по маршруту, удовлетворяющий всем перечисленным выше критериям. Далее нам придётся прибегнуть к более формальному языку изложения, коль скоро речь пойдёт о математических моделях.
Далее нам придётся прибегнуть к более формальному языку изложения, коль скоро речь пойдёт о математических моделях.
Ведение по маршруту с экстраполяцией позиции
Ранее упоминалось, что благодаря притяжке геопозиции пользователя к маршруту навигации мы можем перейти от двумерных географических координат к одномерной координате — смещению относительно начала маршрута (для краткости дальше будем использовать термин «смещение» без уточнений).
Вспомним поступающие к нам данные и введём для них обозначения:
— реальные отсчёты смещения, получаемые притяжкой позиции GPS к линии маршрута;
— время прихода соответствующих отсчётов смещения.
На этом, собственно, список входных данных и заканчивается. Придётся выжимать из них максимум полезной информации.
В конечном итоге нам необходимо построить функцию экстраполяции смещения , которая будет приближена к реальной динамике автомобиля и при этом обеспечит плавность движения маркера GPS по всему нашему маршруту (его длина ни на что не повлияет, так как завершение маршрута обрабатывается отдельно, поэтому условно будем считать маршрут бесконечным). Для обеспечения хорошей визуальной плавности достаточно будет условия гладкости , то есть ни позиция, ни скорость маркера не должны меняться скачком. Другими словами, функция обязана быть непрерывной вместе со своей первой производной (здесь и далее — по времени) на всей области определения.
Для обеспечения хорошей визуальной плавности достаточно будет условия гладкости , то есть ни позиция, ни скорость маркера не должны меняться скачком. Другими словами, функция обязана быть непрерывной вместе со своей первой производной (здесь и далее — по времени) на всей области определения.
Обратим внимание, что каждый реальный отсчёт смещения несёт существенно новую информацию о движении. Например, если в течение длительного времени автомобиль ехал равномерно, а затем стал ускоряться, то «почувствовать» ускорение навигатор сможет только с приходом очередного отсчёта. Так как заглянуть в будущее на сколь угодно длительный срок мы не можем, все поступающие новые отсчёты GPS будут в общем случае изменять поведение искомой функции , что не позволяет задать её одним аналитическим выражением. Вместо этого попытаемся определить функцию кусочно. Для этого решим сперва более простую задачу.
Непосредственная кусочная экстраполяция
Построим такую функцию экстраполяции смещения , чтобы после -го отсчёта её значения предсказывали реальное расположение пользователя в течение достаточного времени до прихода -го отсчёта. Все полезные данные, которыми мы обладаем, — последовательность отсчётов до -го включительно вместе со временем получения каждого из них.
Все полезные данные, которыми мы обладаем, — последовательность отсчётов до -го включительно вместе со временем получения каждого из них.
Вспомнив про конечные разности, отметим, что у нас есть возможность оценить скорость движения автомобиля в -й момент времени, разделив длину отрезка между последним и предпоследним смещением на соответствующий временной интервал:
, где — оценка скорости по отсчётам, а — производная экстраполяционной функции , которую мы пытаемся построить.
Аналогично для производных более высокого порядка — ускорения, рывка и т.д.:
Как видно из этих формул, для получения оценки всё более старших производных смещения требуется учитывать всё больше отсчётов, предшествующих текущему: для определения скорости нужны два отсчёта, для ускорения — три, для рывка — четыре и т.д. С одной стороны, чем больше динамических характеристик движения мы будем учитывать в своём прогнозе, тем большую моделирующую способность получим; с другой — полезная информация, содержащаяся во всё более «старых» отсчётах, драматически теряет актуальность. Например, тот факт, что мы ехали со скоростью 30 км/ч минуту назад ничем не поможет нам в текущий момент времени: с тех пор можно было несколько раз разогнаться, затормозить или вообще остановиться. По этой причине оценки всё более старших производных смещения становятся всё дальше от реальности; кроме того, вклад погрешности вычисления некоторой производной в общую аналитическую модель смещения тоже растёт с увеличением порядка этой производной. Раз так, то, начиная с какого-то порядка, динамические характеристики, оценённые при помощи конечных разностей, вместо уточнения будут только портить нашу модель.
Например, тот факт, что мы ехали со скоростью 30 км/ч минуту назад ничем не поможет нам в текущий момент времени: с тех пор можно было несколько раз разогнаться, затормозить или вообще остановиться. По этой причине оценки всё более старших производных смещения становятся всё дальше от реальности; кроме того, вклад погрешности вычисления некоторой производной в общую аналитическую модель смещения тоже растёт с увеличением порядка этой производной. Раз так, то, начиная с какого-то порядка, динамические характеристики, оценённые при помощи конечных разностей, вместо уточнения будут только портить нашу модель.
По результатам проверок на реальных данных выяснилось, что оценка рывка , особенно в случаях «среднего» качества сигнала GPS, уже достаточно плоха, чтобы от неё было больше вреда, чем пользы. С другой стороны, к счастью, наиболее частые сценарии динамики автомобиля — это покой, равномерное и равнопеременное движение, описываемые полиномиальными уравнениями 0-й, 1-й и 2-й степени от времени соответственно.
Получается, квадратичной модели равнопеременного движения нам будет вполне достаточно для описания большинства дорожных ситуаций, и для неё у нас как раз хватает более-менее качественных оценок динамических характеристик — скорости и ускорения. Вспомнив школьный курс физики, мы уже можем вчерне составить аналитическое выражение для искомой экстраполяционной функции:
Осталось сделать всего один шаг: область определения начинается с момента времени , поэтому время в вычислениях удобнее считать с этого же момента.
В итоге функция примет вид:
Замечательной особенностью этой функции является её гладкость на всей области определения, что, как упоминалось ранее, входит в постановку нашей задачи.
Теперь возьмём несколько реальных отсчётов смещения с устройства и попробуем экстраполировать их на каждом интервале (хотя определена до , в момент прихода отсчёта будем сразу переходить к следующей функции , ведь она располагает более свежими данными):
Оговоримся, что для наглядности данные были сняты при сравнительно низком качестве сигнала GPS, однако ситуация на рисунке вполне реальна и может возникнуть у любого пользователя.
Гладкость каждого экстраполяционного полинома прекрасно видна на соответствующем временном интервале, но вот беда — на стыках интервалов общая серая кривая терпит разрывы, подчас весьма заметные.
Назовём величину разрыва в -й момент времени ошибкой экстраполяции . Действительно, именно это значение показывает, какую неточность имеет каждый наш прогноз к концу его временного интервала. Вычислить значение ошибки можно при помощи следующего выражения:
Увы, свести ошибку к нулю, варьируя сами функции , мы никак не можем, ведь это было бы эквивалентно стопроцентной точности видения будущего. Значит, для решения нашей исходной задачи построения единой функции придётся каким-то образом «склеить» между собой кусочные экстраполяционные полиномы, то есть скорректировать возникающие на стыках ошибки.
Подход к коррекции ошибок
В соответствии с выбранными выше обозначениями можно неформально сказать, что к моменту прихода нового отсчёта мы находимся в точке , т. е. сдвинуты относительно реальной позиции на величину погрешности , накопленной к моменту предыдущим экстраполяционным полиномом .
е. сдвинуты относительно реальной позиции на величину погрешности , накопленной к моменту предыдущим экстраполяционным полиномом .
С одной стороны, с точки зрения соответствия выдаваемых пользователю данных реальности, наилучшим способом коррекции ошибки будет разрыв функции в точку начала следующего полинома , однако мы не можем так поступить, ведь в этом случае снова станем «телепортировать» маркер по карте и дезориентировать водителя.
Очевидно, что если мгновенное изменение значения недопустимо, коррекция ошибки будет занимать некоторое ненулевое время. Также понятно, что коррекцию ошибки желательно завершить до прихода следующего отсчёта, дабы не допустить накопления ошибки.
В силу стохастической природы временных интервалов между отсчётами смещения достоверно определить точное время коррекции не представляется возможным. Поэтому в первом приближении зафиксируем время коррекции ошибки в виде некоторой постоянной величины, конкретное значение которой подберём в будущем опытным путём.
Если снова говорить неформальным языком, для коррекции ошибки требуется из точки за время плавно «вернуться» на следующий экстраполяционный полином — кривую .
Для описания процесса коррекции ошибки удобно ввести отдельные функции коррекции таким образом, чтобы в момент времени соответствующая функция коррекции принимала значение , а начиная с момента становилась равна нулю:
Если сложить такую функцию коррекции с соответствующим интерполяционным полиномом, то в ключевых точках и мы обеспечим коррекцию ошибки смещения:
Назовём скорректированной функцией смещения сумму экстраполяционного полинома и соответствующей функции коррекции:
Заметим, что благодаря описанным выше свойствам функций коррекции мы получили очень важное свойство функций — они уже «сшиты по смещению», т.е. не терпят разрывов в точках :
Совокупность скорректированных функций могла бы претендовать на роль искомой модели смещения , определённой во все моменты времени, если бы не одно обстоятельство: несмотря на отсутствие разрывов смещения в точках , производные этой совокупности функций в общем случае всё ещё рвутся.
Конкретно нас интересует разрыв первой производной — скорости, потому что исходные требования содержат условие повсеместной гладкости , т.е. условие повсеместной непрерывности скорости. С учётом этого необходимо расширить требования к функциям коррекции , чтобы «сшить» ещё и производные скорректированных функций :
Это уравнение является условием гладкости совокупности скорректированных функций. Подставив в обе части уравнения определение скорректированных функций, получим
Ранее мы упоминали о том, что после истечения времени коррекции функция коррекции принимает нулевые значения. Добавим ещё одно требование к функции коррекции — пусть её производная после истечения времени коррекции также принимает нулевые значения:
Тогда, в предположении, что время коррекции всегда меньше интервала между отсчётами, можно считать, что производная -й функции коррекции к моменту прихода следующего отсчёта уже обратится в ноль. Тогда, возвращаясь к условию гладкости, получим:
Тогда, возвращаясь к условию гладкости, получим:
Выразим отсюда :
Заметим, что представляет собой оценку скорости, сделанную при помощи конечных разностей, подставим её:
Правая часть представляет собой ошибку экстраполяции скорости — разность между скоростью, полученной по предыдущему экстраполяционному полиному, и «реальным» отсчётом скорости. Теперь мы можем собрать воедино граничные условия для функций коррекции:
Словами их можно описать так — необходимо найти функцию коррекции, чтобы:
- в начале интервала коррекции её значение совпадало с ошибкой экстраполяции смещения;
- в начале интервала коррекции значение её производной совпадало с ошибкой экстраполяции скорости;
- в конце интервала коррекции и далее значение самой функции и её производной было нулевым.
Выбор функции коррекции ошибок
Стоит отметить, что получить единое аналитическое выражение для функций коррекции , в точности удовлетворяющее вышеуказанным четырём условиям, очень сложно. Проблема заключается в той части области определения, которая идёт после истечения времени коррекции , — нужно добиться нулевых значений функции и её производной на всём остатке числовой оси. Для упрощения задачи сократим область определения искомого аналитического выражения функции коррекции до интервала коррекции , а после верхней его границы будем считать значение функции и её производной тривиально нулевым (благо, на уровне программного кода у нас есть такая возможность из-за наличия ветвлений).
Проблема заключается в той части области определения, которая идёт после истечения времени коррекции , — нужно добиться нулевых значений функции и её производной на всём остатке числовой оси. Для упрощения задачи сократим область определения искомого аналитического выражения функции коррекции до интервала коррекции , а после верхней его границы будем считать значение функции и её производной тривиально нулевым (благо, на уровне программного кода у нас есть такая возможность из-за наличия ветвлений).
Формально с учётом этого приёма функция коррекции кусочной — некоторое выражение для интервала коррекции и константа 0 далее, однако при соблюдении граничных условий в точке не будет разрыва ни самой функции коррекции, ни её первой производной. Так как разрывы более старших производных нас не интересуют (они не испортят гладкости искомой функции ), в дальнейшем не будем упоминать о нулевом «хвосте» функции коррекции, а граничные условия переформулируем в более удобном виде:
Обозначим ошибку экстраполяции скорости через :
Теперь нужно определить аналитическое выражение для . В связи с эргономическими требованиями к программе, помимо граничных условий, нужно, чтобы функция коррекции имела как можно меньше экстремумов и перегибов на интервале коррекции — чтобы маркер GPS «не дёргался».
В связи с эргономическими требованиями к программе, помимо граничных условий, нужно, чтобы функция коррекции имела как можно меньше экстремумов и перегибов на интервале коррекции — чтобы маркер GPS «не дёргался».
Самой простой функцией, подходящей под эти требования, опять является полином — полином минимально возможной степени от времени (теоретически, сходными характеристиками среди элементарных функций обладает ещё и, например, синус, но вычислять его значение накладнее с точки зрения процессорного времени).
Так как граничные условия представляют собой систему из четырёх нетривиальных уравнений, то минимальной степенью полинома, обеспечивающей достаточную параметризацию функции коррекции, является третья. Учитывая то, что при построении аналитического выражения для удобнее считать время с момента -го отсчёта (ровно так же, как и в определении , нужный полином примет следующий вид:
Подставив это выражение в систему граничных условий и решив её относительно констант и , получим следующие значения:
В итоге, если определить функции коррекции описанным образом, то скорректированные функции сливаются в единую функцию экстраполяции , гладкую во все моменты времени. Полное выражение для приводить не будем в силу его громоздкости.
Полное выражение для приводить не будем в силу его громоздкости.
Примечание: последняя неточность осталась в допущении при выборе времени коррекции — наши рассуждения строились в свете условия, что всегда будет меньше интервала между отсчётами:
Приятной особенностью построенной модели является то, что нам достаточно выбрать таким образом, чтобы оно не превышало среднего времени между отсчётами: в случае, если отдельные интервалы будут меньше , то часть ошибки, которую мы не успели докорректировать на слишком коротком интервале, будет скорректирована на одном из следующих. Для этого достаточно будет вычислять ошибку экстраполяции не по обычной экстраполяционной функции , а по скорректированной :
На рисунке ниже изображён пример графика итоговой функции экстраполяции , построенный по реальным данным:
Формальная задача решена, полученная кривая удовлетворяет всем оговоренным условиям, да и выглядит вполне симпатично. Можно было бы на этом и расслабиться, но особенности реального мира представляют определённые трудности для построенной идеализированной системы.
Можно было бы на этом и расслабиться, но особенности реального мира представляют определённые трудности для построенной идеализированной системы.
Рассмотрим некоторые из них более подробно, оговорившись, что все принятые далее решения реализуются непосредственно в программном коде за пределами математической модели.
Адаптация математической модели к реальным условиям
Запрет движения маркера в обратном направлении
На последнем графике можно заметить, что в некоторых случаях функция начинает убывать, даже когда по реальным отсчётам пользователь едет исключительно вперёд по маршруту. Такое происходит, когда наш прогноз сильно переоценивает скорость движения. С другой стороны, в реальности автомобиль двигается в обратном направлении только по двум причинам: водитель действительно включил заднюю передачу и отправился назад (очень редкий случай), либо выполнил разворот.
В случае разворота дорожная ситуация существенно меняется, что требует перестроения навигационного маршрута; это представляет собой отдельную тему и никак не укладывается в рамки данной статьи.
Если мы воспользуемся результатами экстраполяции позиции по непосредственно, то из всех движений маркера в сторону начала маршрута соответствовать реальному движению автомобиля в том же направлении будет исчезающее меньшинство. В свете этого было принято решение вообще запретить маркеру двигаться назад без перестроения маршрута, дабы не вводить пользователей в заблуждение.
Такое жёсткое условие трудно описать на языке математики, но в программном коде реализовать сравнительно легко. Для начала учтём дискретный характер модельного времени — в силу особенностей функционирования вычислительных машин получать результаты экстраполяции мы в любом случае будем в некоторые выделенные моменты времени.
Раз так, то обеспечить неубывание экстраполированного смещения будет нетрудно: достаточно сравнить новое полученное значение с предыдущим, и если текущее окажется меньше, то подменить его предыдущим. Несмотря на кажущуюся грубость этого приёма, гладкости функции экстраполяции мы не нарушим, ведь, для того чтобы начать двигаться назад по гладкой функции, нужно сначала полностью остановиться.
В будущем режим работы, когда мы подменяем математически корректные значения более старыми, чтобы не допустить движения назад, будем называть режимом принудительной остановки.
Слишком большие ошибки экстраполяции и слишком долгие интервалы между отсчётами
Несмотря на то, что мы построили в некотором смысле качественную функцию , иногда ошибки экстраполяции могут достичь недопустимых величин. В этих случаях программа должна прекратить попытки скорректировать ошибки штатными средствами. Ещё одна ситуация, когда экстраполированные данные теряют актуальность, возникает, если новый отсчёт смещения по какой-либо причине не приходит слишком долго — моделирующая способность драматически падает с момента получения последнего отсчёта. Чтобы не перейти грань между попытками прогнозирования и бессовестной ложью, полагаться на модель обычно стоит не дольше трёх секунд.
Для простоты назовём первую негативную ситуацию некорректируемой ошибкой смещения, а вторую — некорректируемой ошибкой времени.
Работать с каждым из этих видов ошибок мы можем двумя способами:
- Входить в упомянутый выше режим принудительной остановки. Достоинство этого подхода — в сохранении плавности движения маркера геопозиции по карте местности. Однако чем дольше мы находимся в режиме принудительной остановки, тем хуже мы информируем пользователя о его реальном местоположении;
- Мгновенно телепортировать маркер GPS на место последнего отсчёта. Здесь мы, наоборот, жертвуем эргономикой ради достоверности информации, подаваемой пользователю.
Для нашего приложения был избран первый способ, так как плавности движения уделяется особо пристальное внимание.
Затянувшийся режим принудительной остановки
Любой вход в режим принудительной остановки сопряжён с выдачей менее точных данных о местоположении в угоду запрету обратного движения маркера GPS. Чтобы не дезинформировать пользователя в особо неблагоприятных случаях, наша модель дополнительно наделена возможностью прерывать режим принудительной остановки «телепортацией» маркера на последнее реальное положение по истечении заданного промежутка времени, вне зависимости от причины входа в режим (математический результат экстраполяции или некорректируемые ошибки смещения/времени). В этот момент даже плавность движений приходится принести в жертву ради «остатков» точности.
В этот момент даже плавность движений приходится принести в жертву ради «остатков» точности.
Выводы
В результате проделанной работы нам удалось улучшить ведение по маршруту так, чтобы обеспечить неплохой баланс между точностью выдаваемых данных и визуальной эргономикой их отображения. Пользователь будет чувствовать себя достаточно комфортно, особенно когда с датчика GPS благодаря хорошему сигналу поступают качественные данные.
Описанную систему экстраполяции можно применять в других приложениях, использующих геопозиционирование. Там, где понятия маршрута, а значит и смещения относительно его начала, не существует, математическую модель из одномерной скалярной можно обобщить до многомерной векторной. Реализация же самой модели в коде не представляет проблем ни на одном из популярных языков программирования — для этого требуются лишь простые арифметические операции.
Что касается дальнейших путей развития, стоит обратить внимание на упомянутую в начале статьи измерительную погрешность в «сырых» позиционных данных от датчика. Если ошибки нашего прогнозирования мы уже сейчас стараемся корректировать, то борьба с ошибками измерений — это отдельный пласт работы на будущее, трудный, но от этого ничуть не менее интересный. Пользу же от потенциальных успехов на этом поприще для точности отображаемой информации трудно переоценить.
Если ошибки нашего прогнозирования мы уже сейчас стараемся корректировать, то борьба с ошибками измерений — это отдельный пласт работы на будущее, трудный, но от этого ничуть не менее интересный. Пользу же от потенциальных успехов на этом поприще для точности отображаемой информации трудно переоценить.
Грейроуд | Nanatsu no Taizai вики
в: Персонажи, Женские персонажи, Демоны,
и еще 2
английский
Просмотреть источник
| Введение |
| Галерея изображений |
Грейроуд
- Аниме
- Манга
Кандзи/Кана
グレイロード
Ромадзи
Гурейродо
Псевдоним
Грейроуд Пацифизм (不殺のグレイロード Fusatsu no Gureirōdo)
Раса
Демон
Пол
Бесполый (упоминается как женщина)
Возраст
156 [1]
Статус
Жив
День рождения
30 марта
Высота
480 см (15 футов 9")
Масса
250 кг (551 фунт)
Цвет глаз
Черный
Красный
Группа крови
? [2]
Принадлежность
Клан Демонов
Десять Заповедей
Род занятий
Член Десяти Заповедей
Способности
Проклятие
Манга Дебют
Глава 109
Дебют аниме
Эпизод 1 (S2)
Японский голос
Кодзи Юса
English Voice
Бен Лепли
Грейроуд 「グレイロード」 — элитный воин Клана Демонов, служащий непосредственно Королю Демонов как Пацифизм Десяти Заповедей.
Содержимое
- 1 Внешний вид
- 2 Личность
- 3 История
- 3.1 3000 лет назад
- 4 Способности и снаряжение
- 4.1 Способности
- 4.1.1 Заповедь
- 4.2 Уровень мощности
- 4.1 Способности
- 5 битв
- 5.1 Арка Великого Фестиваля Бойцов
- 5.2 Арка Оборонительная битва за Лионес
- 6 Отношения
- 7 Общая информация
- 8 Каталожные номера
- 9 Навигация
Внешний вид
Полный внешний вид аниме
Грейроуд — мутировавший серый демон. Хотя Фраудрин отмечает, что низшие демоны не являются ни мужчинами, ни женщинами, он называет Грейроуд женщиной из-за ее уникального уровня силы и способностей. Ее тело покрыто ее собственной тьмой, и все ее многочисленные лица способны говорить. Под тьмой, скрывающей ее форму, Грейроуд состоит из множества пухлых серых демонов размером с карлика, каждый из которых может свободно говорить и двигаться.
Грейроуд способна превращать свое тело в большую сеть тьмы, к которой она подвешивает инкубационные яйца. В этой форме ее лица разбросаны по ответвлениям ее тела, а яйца, которые она несет, прозрачны и наполнены прозрачной жидкостью.
Личность
Серая дорога жестока до такой степени, что использует людей, чтобы превратить их в низших Демонов, чтобы настроить их против своих старых родственников.
Несмотря на то, что она является самым молодым членом Десяти Заповедей, удивительно отметить, что она невероятно умна, поскольку она, кажется, хорошо знакома с законами Времени и магии, а также с важностью силы между Указами Короля Демонов. и простые магические способности.
Также может быть, что за своей природной жестокостью Грейроуд может легко поддаться панике, как, когда она узнает о происхождении Мерлина, а также о величине своих магических способностей.
История
3000 лет назад
Вместе с остальной частью клана Демонов Грейроуд был запечатан кланом Богини после поражения в Древней войне против других четырех рас (людей, фей, великанов и богинь).
Способности и снаряжение
Являясь членом Десяти Заповедей, Грейроуд обладает исключительной силой. Как и все члены Клана Демонов, она обладает уникальной силой тьмы, подобной Мелиодасу в Вайзеле. Она способна использовать эту темную силу, чтобы пассивно летать самостоятельно. Ее аура в сочетании с аурой других Десяти Заповедей настолько ужасающа, что обычно спокойный Хендриксон вспотел от страха перед их присутствием.
Грейроуд способна порождать новых демонов, имплантируя демонические растения в существ, лишенных магии, и заключая их в яйцевидные стручки. Эти демонические растения размером примерно с кунжутное семя, и поэтому их нельзя удалить такими способностями, как «Большой куш» Бана. Если оставить их в покое, яйца в конечном итоге отделяются сами по себе, и из них вылупляются слуги, призванные служить ей. Если стручки отделить преждевременно и, таким образом, подвергнуть воздействию определенной температуры, рост яйца ускорится и превратится в новых демонов в течение нескольких секунд. Грейроуд продемонстрировал способность производить Серых Демонов и Красных Демонов с помощью этой способности.
Грейроуд продемонстрировал способность производить Серых Демонов и Красных Демонов с помощью этой способности.
Способности
- Проклятие 「 不浄 , Касу 」: Сила, которая не прибегает к насилию, позволяет Серой Дороге наносить различные виды повреждений целям. тем самым предохраняя ее от воздействия ее собственной заповеди.
- Изменение формы : Она способна изменять свою внешность и голос, чтобы идеально имитировать образ своей цели. Другие не могут видеть сквозь эту способность.
Заповедь
Грейроуд была награждена Заповедью Пацифизма 「 不殺 , Фусацу 」 Королем Демонов. У любого, кто убьет в ее присутствии, украдут время, и он быстро состарится, пока не умрет.
Уровень мощности
| Всего | Магия | Прочность | Дух |
|---|---|---|---|
| 39 000 | 26 500 | 10 000 | 2 500 |
Battles
Great Fight Festival arc
- Meliodas vs.
 Ten Commandments: Win
Ten Commandments: Win
Defensive Battle for Liones arc
- Merlin vs. Grayroad: Lose
Relationships
Trivia
- According в официальный фанбук:
- Принадлежность: Неизвестно
- Место рождения: Царство Демонов
- Особая способность: Повелевать себе подобными (Серые Демоны)
- Хобби: Самостоятельные конференции
- Распорядок дня: ничего
- Любимая еда: души
- Мечта/Надежда: Возрождение Короля Демонов
- Charmpoint: ничего
- Заповедь Грейроуда, Пацифизм , кажется, основана на заповеди: «Не убий».
- Она самый молодой член Десяти Заповедей.
- Было заявлено о существовании единственного экземпляра мутировавшего серого демона, обладающего силой, несравнимой с другими в своем роде. [3] Грейроуд оказался тем мутантом.
- В конце манги «Семь смертных грехов» Грейроуд и Меласкула — единственные Заповеди, которые не изменили свое мнение и до сих пор сохранились в истории.
 Любая другая Заповедь, за исключением Галанда, в какой-то момент переходит на другую сторону или теряет поддержку Короля Демонов. Галана нет, но его убивает Эстаросса. Грейроуд и Меласкула схвачены, но не убиты.
Любая другая Заповедь, за исключением Галанда, в какой-то момент переходит на другую сторону или теряет поддержку Короля Демонов. Галана нет, но его убивает Эстаросса. Грейроуд и Меласкула схвачены, но не убиты.
Ссылки
- ↑ Второй официальный фанбук, стр. 34
- ↑ Второй официальный фанбук, стр. 34
- ↑ Nanatsu no Taizai Манга: Том 15
Навигация
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Контент сообщества доступен по лицензии CC-BY-SA, если не указано иное.
Все, что вам нужно знать о значках Waze в 2022 году
Наш сайт поддерживается нашими пользователями. Иногда мы получаем партнерские ссылки, когда вы переходите по партнерским ссылкам на нашем веб-сайте.
Waze – это картографическое программное обеспечение, похожее на Google Карты, которое предоставляет путешественникам указания и информацию о том, как добраться из точки А в точку Б, но с некоторыми особенностями.
Google владеет Waze, и некоторые люди называют Waze «Картами Google с индивидуальностью».
Вы можете получить его в магазине приложений Apple или Google Play Store.
Waze использует символы для многих типов дорожных ситуаций.
Некоторые значки Waze могут сбить с толку многих пользователей Waze из-за отсутствия контекста.
К ним относятся настроения Waze.
Настроения Waze сообщают водителям поблизости с помощью приложения Waze о том, что вы находитесь там, и о том, как вы себя чувствуете в данный момент.
Содержание
- Что такое значки Waze?
- Для чего нужны значки Waze?
- Кто может видеть используемые вами значки Waze?
- Что означают значки Waze?
- Когда следует использовать значки Waze?
- Как изменить значок Waze
- Другие полезные функции Waze
- Подведение итогов
Что такое значки Waze?
Иконки Waze — это крошечные картинки.
Значок, похожий на камеру или прожектор, означает, что камера подключена к этому светофору.
Значок, похожий на аварию, указывает на аварию.
Предупреждающий знак означает, что на дороге или рядом с ней есть что-то опасное.
Другие значки выглядят как маленькие логотипы Waze, которые навигационное приложение называет настроением.
Настроения Waze — это значки, которые водители выбирают в настройках мобильного приложения Waze.
Они предназначены только для Waze и недоступны в других автоприложениях для Android.
Это значок вашего автомобиля для других водителей поблизости.
Для чего нужны значки Waze?
Некоторые значки Waze в мобильном приложении Waze отображают информацию о дорожном движении, например
- при медленном движении
- при превышении скорости
- при движении на обочине.
Эта информация отображается на экране, а выбранный голос говорит вам об этом вслух.
Другие значки показывают, где вы и другие пользователи Waze находитесь в пути.
По умолчанию вы видите синюю стрелку, указывающую на вас.
Другие люди видят настроение Waze, которое выглядит как маленькая иконка в виде облачка с изображением лица и другими элементами.
Waze Icon Moods
Значки настроения Waze — это значки, которые водители выбирают для представления своего автомобиля на дороге другим водителям, использующим приложение Waze.
Некоторые из символов выглядят как человек, а другие - как домашние животные, природа или другие вещи.
Waze создал настроение, чтобы показать эмоции водителей.
Многие водители выбирают тот, который им подходит, и оставляют его на неопределенный срок.
Пользователь Waze может менять свое настроение каждый раз, когда использует навигационное приложение Waze.
Кто может видеть используемые вами значки Waze?
Кто увидит установленный вами значок Waze, зависит от ваших настроек.
Если вы выберете Стать невидимым, другие водители не увидят ваш значок на карте.
Некоторые другие функции недоступны в невидимом режиме.
По умолчанию любой, кто использует Waze, может видеть ваш значок Waze.
Люди, которые являются вашими друзьями в приложении, могут видеть ваше имя пользователя и другую личную информацию, которую вы предоставляете.
Когда вы предоставляете отчеты о состоянии дорожного движения, люди, которые просматривают эти отчеты, увидят ваше имя пользователя.
Что означают значки Waze?
Каждый значок Waze имеет свою форму, цвет и общее значение.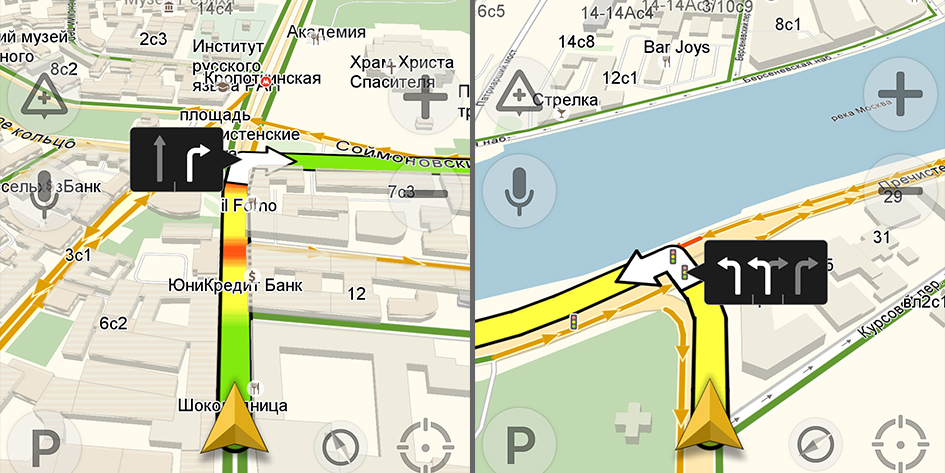
Некоторые из них менее информативны и симпатичнее.
Ближайшие водители отображаются в виде значка, который они выбрали для своего представления, или в виде значка по умолчанию, если они его не выбрали.
Waze основывает все значки Waze на форме Waze по умолчанию, а некоторые могут иметь два варианта отображения, которые, похоже, следуют гендерным стереотипам.
Большинство из них имеют только один вид.
Определенные действия открывают определенные настроения, и только редакторы карт могут получить доступ к трем из них.
Один набор помечен как специальный.
Смена настроения недоступна, пока вы не проедете в Waze 100 миль.
С этого момента вы считаетесь «взрослым Waze» и можете менять настроение.
Различные действия добавляют очки, повышающие уровень вашего Вейзера до уровня Воина, затем Рыцаря, а затем Королевской особы.
Каждый немного меняет Wazer.
- Waze Baby — по умолчанию — с соской.
- Waze Взрослый простой.

- Воин Waze имеет щит. Это показывает, что вы входите в 10% лучших результатов в вашем регионе.
- У Waze Knight есть меч. Это показывает, что вы входите в 4% лучших результатов в вашем регионе.
- У королевской семьи Waze есть корона. Это показывает, что вы входите в 1% лучших результатов в вашем регионе.
Специальные значки Waze для редакторов карт:
- Тираннозавр — этот очаровательный маленький зеленый тираннозавр Рекс с выступающими клыками.
- 8 бит. Синий пиксельный Wazer воплощает в себе 8-битные стили ранних вычислений.
- Robotic — Серый робот Wazer выглядит как маленькое металлическое существо.
Иконки Waze, которые может выбрать любой:
- Забавный — этот желтый Wazer нашел что-то веселое и громко смеется со слезами на щеках.
- Солнечно – Веселое солнце светит всем, кто смотрит на него.
- Zombified — Wazer-нежить — развлечение для людей, которым нравятся истории о зомби-апокалипсисе.

- Wild — этот синий Wazer носит мотоциклетный шлем и солнцезащитные очки.
- Холод. Оранжевый Вейзер носит солнцезащитные очки и выглядит воплощением крутости.
- Разъяренный — злой красный Вейзер, кажется, кричит на любого, кто будет слушать.
- Компьютерщик. Этот синий Wazer носит очень большие очки и выглядит умным.
- Счастливый – Трудно быть счастливее, чем этот маленький розовый Вейзер
- Влюбленный – Фиолетовый Вейзер с красными глазами-сердечками полон любви.
- Подлый — очаровательный Вейзер в темно-сером костюме ниндзя пробирается по карте.
- Экологичный. Вейзер, похожий на Землю с континентами и океанами, имеет сердце в левом верхнем углу головы.
- Гордый. Этот маленький фиолетовый Wazer украшен радужным сердцем.
- Грустный – Слеза течет по щеке этого маленького синего Вейзера.
- Скептический — этот оранжевый Wazer не верит ни единому слову, которое слышит.
- Застенчивый – Румянец окрашивает щеки этого желтого Вейзера.

- Carsick — Этот Wazer может захотеть остановиться — он выглядит немного зеленым.
- Дзен — фиолетовый вейзер полон умиротворения, когда он спокойно медитирует.
- Скоростной — этот красный Wazer хочет мчаться как можно быстрее!
Особые значки Waze:
Доступны особые настроения: Сообразительный, Мощный, Веселый, Пряный, Пикантный, Причудливый, Необычный, Кошка, Собака, Мастер Чиф, Эшарум, Чейз, Маршалл, Скай, Красный, Дузер, Внимательный, Открытый, Яркий, Обнадеживающий, Радостный, Ком, Лоретта, Джега, Купидон, Волшебный, Злющий, Милый и Сильный.
Когда следует использовать значки Waze?
В любое время вы можете использовать значки Waze, вы можете использовать их.
Вы должны выбрать свое настроение перед началом поездки или во время остановки.
Значки Waze, обозначающие отчеты о дорожных ситуациях, можно использовать без помощи рук с голосовыми командами телефона.
Как изменить значок Waze
- Откройте приложение Waze на своем iPhone или устройстве Android.
- В нижней части экрана коснитесь «Мой Waze».
- В верхней части экрана вы увидите Wazer, а под ним слово Wazer со стрелкой, указывающей вправо. Коснитесь слова.
- Прокрутите список вниз, пока не увидите слово «Настроение». Коснитесь его.
- Прокрутите список настроений и выберите одно из них. Коснитесь его.
- Вы вернетесь в свой профиль с новым Wazer под изображением вашего профиля.
Другие полезные функции Waze
Waze имеет множество удобных функций.
Вы можете использовать встроенную музыку YouTube во время вождения.
Вы можете настроить голос навигации, чтобы он говорил вам, куда повернуть.
Вы можете использовать голосовую команду, чтобы изменить ситуацию или сообщить об опасностях на дороге в приложении.
Waze предлагает варианты объездных маршрутов.
Голосовые указания Waze включают в себя голоса Джейка Шоу (руководитель креативного отдела Waze), Кевина Конроя (Бэтмен), Уолли Вингерта (Загадочник) и Мастера Чифа из Halo Infinite.
Выберите голос навигации или создайте его в приложении Waze на iPhone или Android-устройстве.
Вы зарабатываете баллы за сообщения об опасностях на дорогах, участках с медленным движением, строительстве и регулярном использовании приложения во время вождения.
Чем больше миль вы проедете с открытым Waze, тем больше очков вы заработаете.
Очки повышают уровень вашего Wazer, что отображается с дополнением к вашему аватару.
Если вы используете совместное использование автомобилей или вам нужно начать совместное использование автомобилей, в приложении Waze есть возможность связаться с другими людьми, у которых есть аналогичные потребности.
Вы выбираете, едете ли вы за рулем или ездите верхом, и устанавливаете некоторую личную информацию, которая передается другим потенциальным карпулерам.
Вы можете подключить Waze к своим профилям в других социальных сетях, что позволит вам подключаться к приложению через вашу сеть.
Затем вы можете поделиться своими поездками с друзьями или увидеть их поездки.









Видео-курс
